**Reimplementation of "Robust Adversarial RL" Paper (https://arxiv.org/abs/1703.02702)
- mujoco_py==0.5.0
- mjpro131
- Fork of OpenAI gym [https://github.com/lerrel/gym-adv]
- Tensorflow>=1.5
- Latest OpenAI baselines
-
[MPI multiprocessing] (mpi installed)
- Enable 8 workers:
mpirun -np 8 python main_mujoco_robust.py
- Enable 8 workers:
-
[PPO & Robust Agent]
- PPO.py
- PPO_RARL.py
- Policy network: MlpPolicy.py
-
[Training]
- Train robust agent:
python main_mujoco_robust.py - Train ppo agent:
python main_mujoco_ppo.py - Eval agent:
python eval.py
- Train robust agent:
-
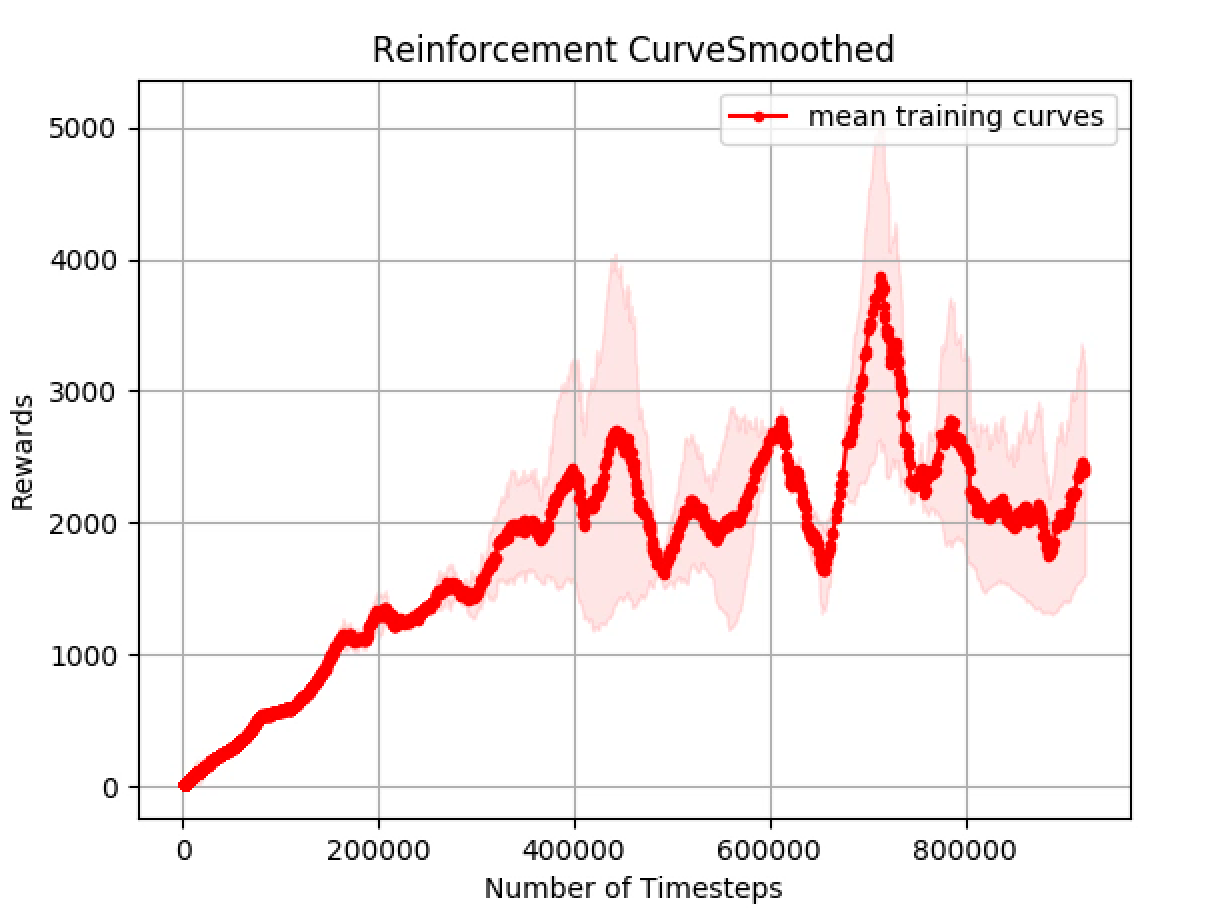
[Visualization]
- Plot with variation
python visualize.py
- Plot with variation
usage: run_mujoco_ppo.py [-h] [--env ENV] [--seed SEED] [--sr SR]
optional arguments:
-h, --help show this help message and exit
--env ENV environment ID (default: HopperAdv-v1)
--seed SEED RNG seed (default: 10)
--sr SR success reward (default: 3800.0)
- [x] Add rendering code for adversarial force in gym-adv
- [x] Add new robotic manipulation environment