Various tracking results can be found here
- Run the following command to install all dependencies
pip3 install -r requirements.txt
- All videos in
clipped_videodirectory have pre tracked results. - All manuallly tracked files are available in
saved_filesdirectory..npyfiles contains co-ordinates of tracked files. -
figure_trackingdirectory contains different tracking visualization code for each gait of origami using already saved.npyfiles. To run the file please press spacebar to go to the next frame -
figure_tracking/matplotlib_saved_files_plot.pyhelps in plotting.npyusing Matplotlib. Can also be used to convert npy file to some other file type like CSV
Folder saved_files contains all CSV files of the tracked results. The results can be found in each dub folder. There are 2 csv files. Lets take example of inchworm motion. There are 2 files named magnet.csv and origami.csv
-
magnet.csv- It contains 2 coloum where each coloumn represents points 2D coordnate of exteme corners of magnet
- The entry in every cell represents
[x y]pixel coordinate. - It contains n rows where row number represents the frame/time stamp of coordinate
-
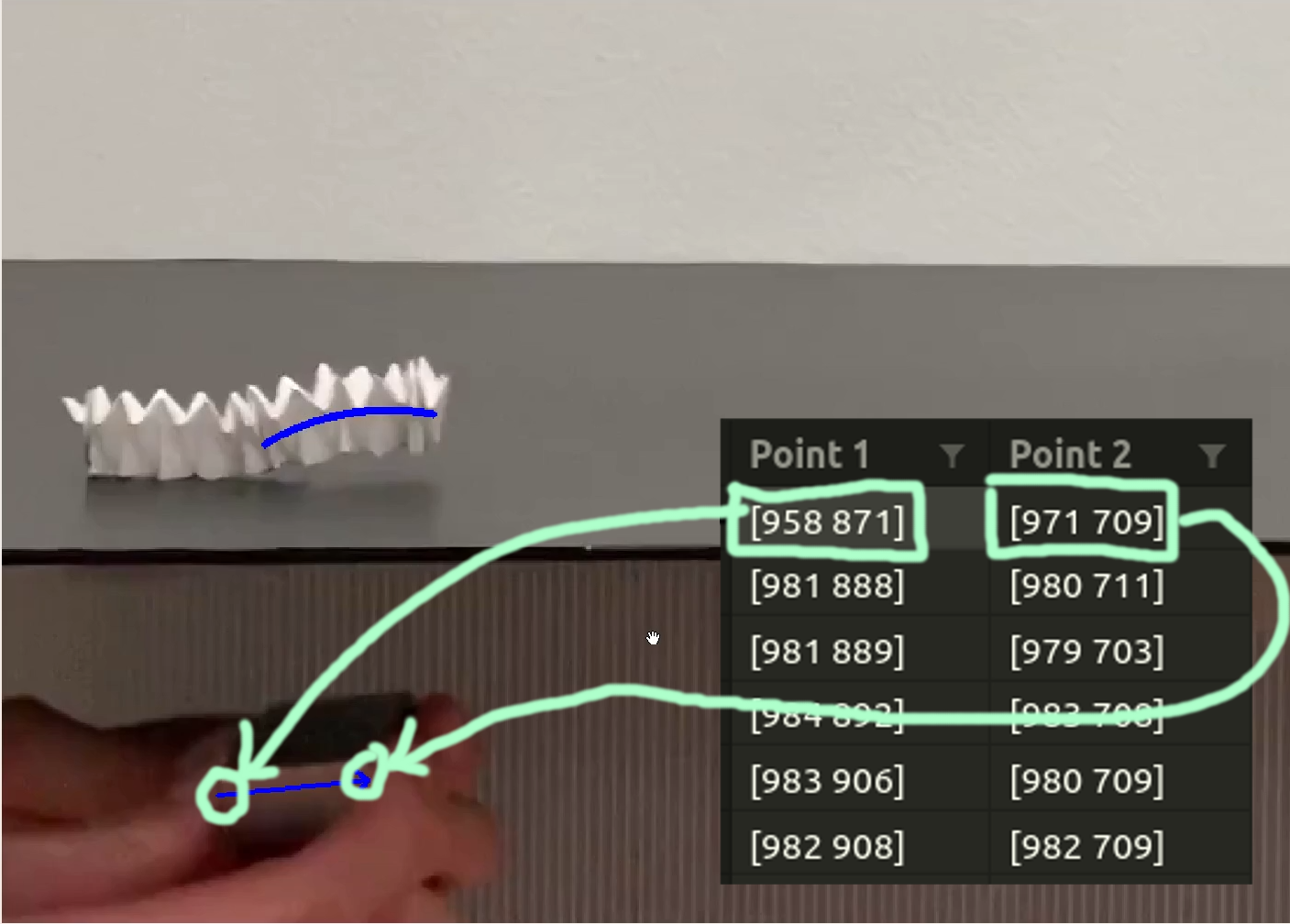
origami.csv- It contains 3 coloum where each coloumn represents points 2D coordnates of origami shape
-
point 1amdpoint 2are extremes of origami whereaspoint 2is the point in bween origami` - The entry in every cell represents
[x y]pixel coordinate. - It contains n rows where row number represents the frame/time stamp of coordinate

frame_by_frame_track.py
- The file helps you to track points in frame by frame.
- The keypoints of the origami/magnet can be manually selected using mouse cursor.
- Use the slider or 'a' and 'd' keys to parse through the frames.
- In the event of wrongly selecting some points, choose the new set of points to rewrite them.
- The chosen points can be viewed by using the slider or 'a' and 'd' keys.
- The keypoints are saved as a .csv file
- Fails in high speed motion and
-
multi_object_tracking.pydraw bounding box across 2 points in consecutive frame to start traking and saving into file. It also draws previous points -
feature_track.pyautomatically find top n features to track and tracks the position of each corners -
optical_flow_tracking.pyUse good features to track points automatically using optical flow algorithm. No manual feature selection in required -
skeleton_track.pytracks multiple point and draws a fitted quadratic curve using 3 points
-
visualise_circlefit_manualtrack.pyhelps you to visualise the tracked points by fitting a circle -
visualise_polyfit_manualtrack.pyhelps you to visualise the tracked points by fitting a quadratic polynomial -
trajectory_plotter.pyplots trajectory of magnet as well as origami using matplotlib
- This repo has mutliple algorithm to track the origami
- Algorithms implemented
- csrt
- kcf
- boosting
- mil
- tld
- medianflow
- mosse
- Optical Flow
- Rohit Lal (website)