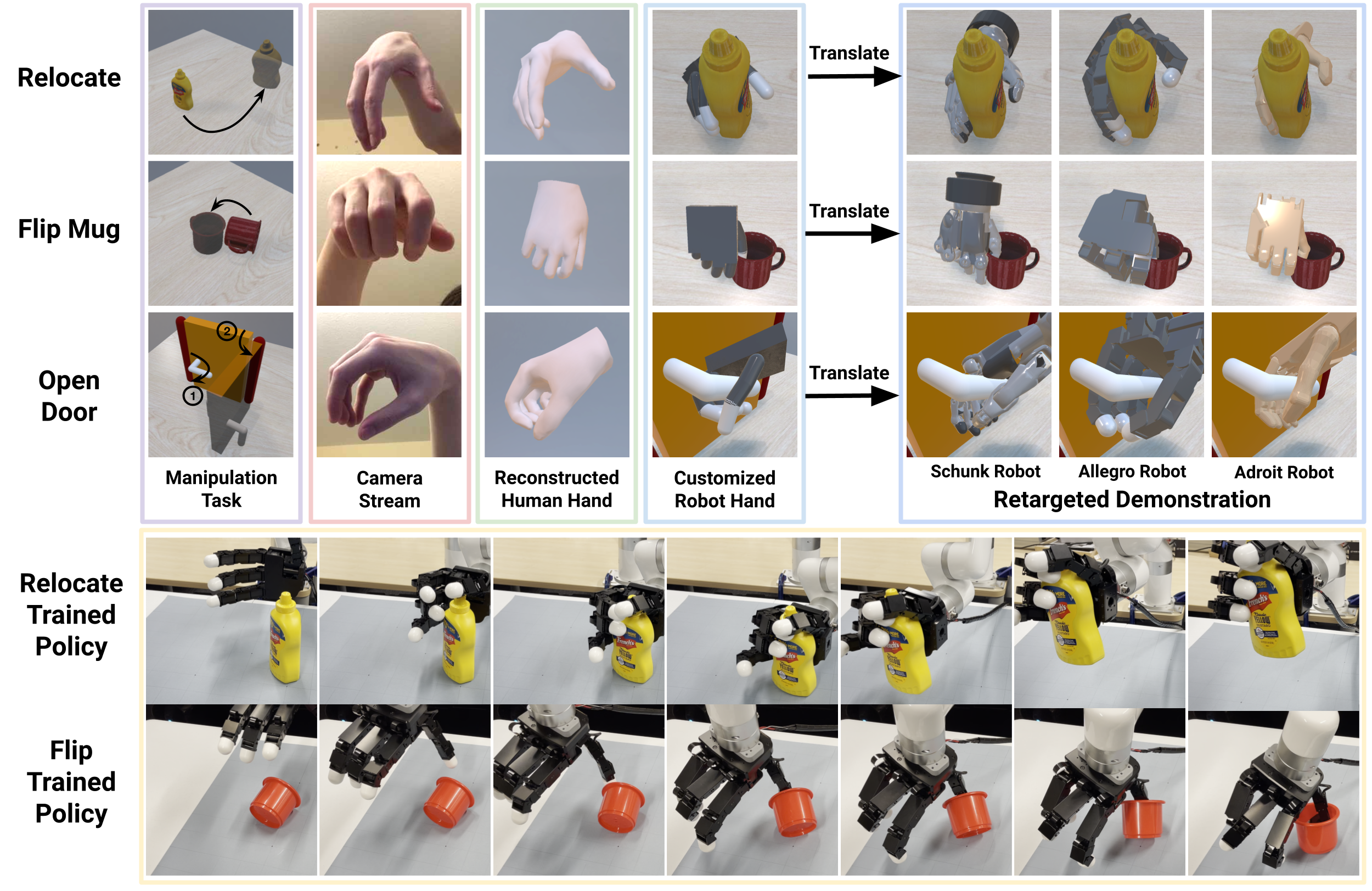
From One Hand to Multiple Hands: Imitation Learning for Dexterous Manipulation from Single-Camera Teleoperation
Yuzhe Qin, Hao Su*, Xiaolong Wang*, RA-L & IROS 2022.
Here we provide a simple system for teleoperation with dexterous hand in simulation, as well as a conversion between MANO/SMPL hand format and simulatable robot model (.urdf) format
git clone git@github.com:yzqin/dex-hand-teleop.git
cd dex-hand-teleop
conda create --name dexteleop python=3.8
conda activate dexteleop
pip install -e .Download data file for the scene
from Google Drive Link.
Place the day.ktx at assets/misc/ktx/day.ktx.
pip install gdown
gdown https://drive.google.com/uc?id=1Xe3jgcIUZm_8yaFUsHnO7WJWr8cV41fEFollow the guidelines provided by the FrankMocap project to download the weight files for the SMPLX hand model and hand pose detector.
Please note that you only need to obtain a subset of the files utilized in the original FrankMocap repository. If the
process is completed successfully, the final file structure should appear as follows within
the hand_detector/extra_data directory. Some weights required by FrankMocap is not necessary for this repo if not
listed below.
├── extra_data
│ ├── hand_module
│ │ ├── mean_mano_params.pkl
│ │ ├── pretrained_weights
│ │ │ └── pose_shape_best.pth
│ │ └── SMPLX_HAND_INFO.pkl
│ └── smpl
│ └── SMPLX_NEUTRAL.pkl-
hand_teleop: main content for the environment, utils, and other staff needs for simulation. It utilizes the same code structure as DexPoint. -
hand_detector: perception code and model to detect hand bbox and regress hand pose in SMPLX format -
assets: robot and object models, and other static files -
example: entry files to learn how to use the teleoperation and the customized robot hand
Run example/customized_robot_hand.py to learn how to construct and control a robot hand based on SMPLX hand parameterization.
Run example/simple_replay.py to visualize the provided
example_teleop_data for each task. It simply replays the demonstration without modification, i.e. visualize the saved
demonstration trajectory without retargeting and generating anything.
Run example/replay_generate_bc_data.py to visualize the processed
example_teleop_data for each task. It replays the demonstration after retargeting and generate the state-action
trajectory that can be consumed by imitation learning algorithms.
Before running the teleoperation demo, make sure that your computer are connected to an iPhone and iPad, and the Record3D app are installed on your device. I am really sorry that the current teleoperation code requires USB connection to the iPad/IPhone, which is not a free function of this app. Feel free to email me if you know other IOS app that provides free camera streaming functionality.
Then follow the instructions in the Record3D repo to make sure that your computer can stream the video from iPhone/iPad. You need to first successfully run the Record3D example before running the teleoperation demo.
Next, set the parameters correctly on your Record3D app. You should use the front FaceID camera instead of the rear
lidar camera. The Live RGBD Video Streaming mode should be set to USB. The Animation Rate (FPS) should be set to 15
initially. You can increase FPS if your hardware is great.
Run example/teleop_collect_data.py to learn how to utilize the teleoperation system to perform a manipulation data and collect the data as a pickle file. If you can see a colored human, it means that you are at the stage of initialization. During initialization, you need to keep your finger spread out and flat to finish the initialization. Otherwise, the initialization process will be restarted again and again. Place the iPhone/iPad in a good position will make your teleoperation much easier, e.g. similar as Figure 3 in the paper.
-
Integrate a new simulation environment into
hand_teleop/env/sim_env. This environment should include all necessary simulation entities, except for the robot. For instance, a grasping task might only require a table and an object within the simulation environment. Data collection for teleoperation will be performed in this simulation environment. -
Use teleoperation to collect data within the simulation environment as in the
teleop_collect_data.pyabove. This process saves the simulation's internal state during teleoperation without taking into account observations and rewards from the reinforcement learning (RL) perspective. -
Based on the simulation environment, define an RL environment within
hand_teleop/env/rl_environment. Building upon the simulation environment, the RL environment incorporates the definition of observations, actions, rewards, and reset functions. -
When generating Imitation Learning data (e.g., state-action trajectories for Behavioral Cloning or reward trajectories), replay or reload the collected simulation states from step 2 and produce corresponding RL data. The advantage of decoupling teleoperation and RL environment definition is that any changes to the observation space (e.g., transitioning from state observation to depth image) do not require recollecting data. Instead, simply replay the pre-collected simulation states to generate new observations.
We would like to thank the following people for providing valuable feedback when testing the system.
Jiarui Xu, Crystina Zhang, Binghao Huang, Jiashun Wang, Ruihan Yang, Jianglong Ye, Yang Fu, Jiteng Mu, Shaowei Liu.
We would like to express our gratitude to the authors of SMPL-X for providing the hand representation, as well as the creators of FrankMocap and MediaPipe for their amazing hand pose detector.
This repository employs the same code structure for simulation environment to that used in DexPoint.
Thanks enyen for adding the RealSense support in the pull request.
@misc{qin2022from,
author = {From One Hand to Multiple Hands: Imitation Learning for Dexterous Manipulation from Single-Camera Teleoperation},
title = {Qin, Yuzhe and Su, Hao and Wang, Xiaolong},
archivePrefix = {arXiv},
year = {2022},
}